申请号:CN202311169162.3
代理机构:武汉红观专利代理事务所(普通合伙) 42247
发明人:张牡丹; 李琳莉; 李丽娜
申请(专利权)人:武昌理工学院
申请人所在国家/地区/组织:CN
公开日期(公开):2023.12.05
公开日期(授权):2024.03.15
IPC分类(公开):E02F9/20
CPC发明(公开):E02F9/205
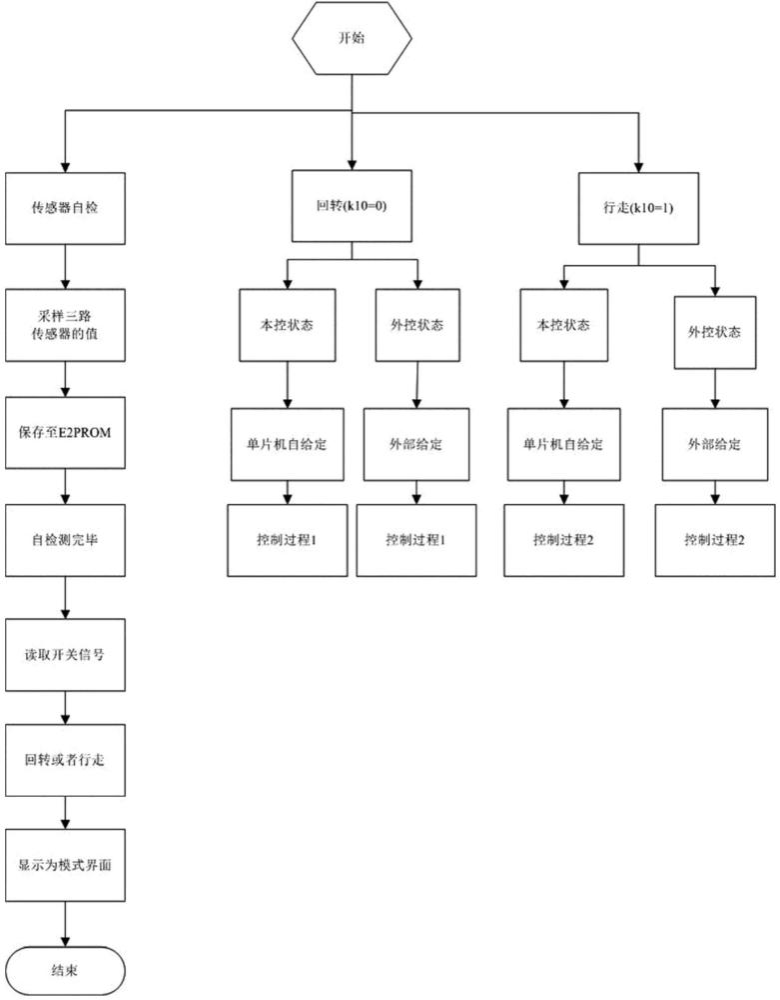
本发明提出了一种无人挖掘机远程智能控制方法,包括如下步骤:S1:在无人挖掘机内置的控制器处配置若干传感器,在开机时进行若干传感器的自检;S2:控制器读取工作模式信号,选择无人挖掘机的回转工作模式或者行走工作模式,控制器的控制对象为无人挖掘机的回转电机和行走电机;S3:设置挖掘机的控制状态:选择无人挖掘机的控制状态为本控状态或者外控状态;S4:在控制器内预置外控状态的输入阈值,当外控状态下的输入超过输入阈值时,无人挖掘机由外控状态切换至本控状态;S5:挖掘机基于本控状态或者外控状态,采用自适应PID方法对无人挖掘机的回转电机和行走电机进行控制。